После Второй мировой войны и, в частности, после войны во Вьетнаме, вертолет зарекомендовал себя в качестве основного военного транспортного средства во время военных действий конца двадцатого и двадцать первого веков. Его успех в основном связан с универсальностью, с которой он может выполнять различные задачи: от транспортировки войск до операций против подводных лодок, от быстрой эвакуации раненых до атак и поддержки пехоты, и все это без необходимости взлетно-посадочной полосы. . Следовательно, специфика каждой миссии требовала диверсификации конфигураций этих машин с точки зрения конструкции, движущей силы и авионики, как это также произошло в мире авиации с неподвижным крылом.
Даже в пределах одной и той же «операционной области» возникли разные философии использования, которые привели к дальнейшей дифференциации средств. Например, архитектура роторов вертолетов - это аспект, который демонстрирует большое разнообразие конструкций, которые можно найти даже в вертолетах с той же задачей. Только подумайте о Boeing AH-64 «Apache» и Kamov KA-50 (начальное фото), оба задумывались как боевые вертолеты, но были разработаны с совершенно разными вариантами конструкции.
Общая информация о роторах

Ротор - это механический элемент, состоящий из нескольких лопастей, которые посредством вращения создают аэродинамическую силу, необходимую для пилотирования и поддержки вертолета. Он состоит из механического вала, приводимого во вращение двигателями самолета, на котором установлена ступица. Лопасти прилагаются к ступице. Создание аэродинамической силы становится возможным именно за счет вращения лопастей: в то время как в случае самолетов поток воздуха попадает в неподвижные крылья из-за поступательного движения самого самолета, в случае вертолета это «крылья» ( т. е. лопасти), чтобы двигаться, рассекая окружающий воздух (отсюда и определение винтокрылых средств).
Еще один ключевой компонент ротора - это наклонная шайба, то есть механический орган, который позволяет вертолету двигаться в любом направлении, изменяя направление, в котором возникает результирующая аэродинамическая сила, и интенсивность этой силы. По сути, наклонная шайба может выполнять два действия: изменять угол наклона всех лопастей ротора или изменять угол наклона лопастей другим способом во время вращения. Первая команда называется коллективный шаг и позволяет изменять значение создаваемой подъемной силы, и, следовательно, это команда, отвечающая за изменение высоты вертолета. Вторая команда говорит циклический шаг и его цель состоит в том, чтобы наклонить ротор и, следовательно, результирующую аэродинамическую силу таким образом, чтобы создать компонент поперечной силы, который позволяет перемещать транспортное средство в четырех горизонтальных направлениях (вперед, назад, вправо и влево). Фактически, циклическое изменение угла падения лопастей означает, что одни лопасти развивают большую подъемную силу, чем другие, и это вызывает наклон ротора в направлении, в котором создается меньшая подъемная сила.
 Ко всему этому мы должны добавить необходимо ввести второй ротор который создает силу (и, следовательно, момент), способную противодействовать противодействию крутящему моменту, действующему на конструкцию вертолета. Фактически, для третьего принципа динамики факт приложения крутящего момента, который приводит лопасти вертолета во вращение, означает возникновение реактивного крутящего момента, имеющего противоположное направление, приложенного к фюзеляжу, включая вращение транспортного средства вокруг своей оси рыскания (оси вертикальный).
Ко всему этому мы должны добавить необходимо ввести второй ротор который создает силу (и, следовательно, момент), способную противодействовать противодействию крутящему моменту, действующему на конструкцию вертолета. Фактически, для третьего принципа динамики факт приложения крутящего момента, который приводит лопасти вертолета во вращение, означает возникновение реактивного крутящего момента, имеющего противоположное направление, приложенного к фюзеляжу, включая вращение транспортного средства вокруг своей оси рыскания (оси вертикальный).
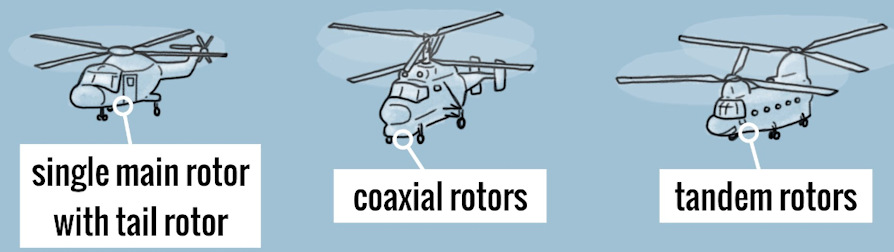
в классическая конфигурациявторой несущий винт расположен в хвостовой части вертолета, и его единственная задача - нейтрализовать этот реактивный момент; поэтому главный ротор отличается от ротора. хвостовой винт, имея разные задачи. Впервые такую архитектуру создал Игорь Сикорский в 1940 году.
Хвостовой винт установлен вертикально (перпендикулярно несущему винту), так что создаваемый подъем создает крутящий момент, который нейтрализует реактивный крутящий момент.
Второе решение проблемы реактивного момента состоит в оснащении вертолета сопряженные роторы встречного вращения, то есть одна или несколько пар основных роторов, вращающихся в противоположном направлении. Таким образом, образующиеся реакционные пары будут иметь противоположное направление и, следовательно, будут нейтрализовать друг друга, без необходимости введения хвостового винта.
Эта архитектура имеет четыре возможных конфигурации:
-
Тандемные роторы
-
Коаксиальные роторы
-
Пересекающиеся роторы
-
Поперечные роторы
Анализ возможных архитектур ударных вертолетов
Мы подошли к случаю ударные вертолеты. Обычно для этой среды выбирают такую архитектуру ротора. Classica или, в некоторых случаях, с коаксиальные роторы встречного вращения. Но каковы преимущества и недостатки обеих конфигураций?
 Наш анализ можно начать со сравнения потребляемая мощность из двух активов. В случае стандартной конфигурации часть мощности, поставляемой двигателем, передается на хвостовой винт для уравновешивания противодействующего крутящего момента, поэтому он не используется для поддержки или перемещения вертолета. Другими словами, это можно рассматривать как «потраченную впустую» мощность.
Наш анализ можно начать со сравнения потребляемая мощность из двух активов. В случае стандартной конфигурации часть мощности, поставляемой двигателем, передается на хвостовой винт для уравновешивания противодействующего крутящего момента, поэтому он не используется для поддержки или перемещения вертолета. Другими словами, это можно рассматривать как «потраченную впустую» мощность.
С другой стороны, в случае соосной архитектуры оба винта являются главными, то есть оба создают аэродинамическую силу, полезную для приведения в движение вертолета. Следовательно, при той же мощности, подаваемой двигателем, а также форме и конструкции лопастей, вертолет с соосными несущими винтами сможет создавать большую общую подъемную силу, что приводит к увеличению переносимой нагрузки и большей тяги при движении. продвижение.
В случае классической конфигурации, чтобы получить такую же грузоподъемность, ротор должен быть увеличен, но это вызовет проблемы сжимаемости на концах лопастей. Фактически, тангенциальная скорость в каждой точке лопасти определяется как:

При увеличении радиуса на концах будут достигнуты скорости, близкие к скорости звука. Это привело бы к возникновению ударных волн и, как следствие, аэродинамическому волновому сопротивлению, повреждая структуру и аэродинамику лопастей.
 Однако подъемная сила, создаваемая соосной конфигурацией, не вдвое больше, чем в стандартном случае, а просто больше, поскольку необходимо учитывать аэродинамическое взаимодействие между лопастями двух роторов.
Однако подъемная сила, создаваемая соосной конфигурацией, не вдвое больше, чем в стандартном случае, а просто больше, поскольку необходимо учитывать аэродинамическое взаимодействие между лопастями двух роторов.
С аэродинамической точки зрения коаксиальные роторы способны лучше справляться с эффектами, вызванными лифтовая асимметрия.
Чтобы объяснить это явление, давайте рассмотрим вертолет с одним несущим винтом в продвинутом полете. Лопасти ротора можно разделить на две группы для каждого цикла вращения: le продвижение лезвий те, которые движутся в том же направлении, что и вертолет, в то время как отступающие лезвия они движутся в направлении, противоположном движению транспортного средства. В результате передние лопасти будут ощущать относительную скорость ветра, равную сумме их тангенциальной скорости плюс скорость движения вертолета, в то время как удаляющиеся лопасти будут ощущать относительную скорость ветра, равную их тангенциальной скорости минус скорость движения вертолета вперед. 'самолет. Следовательно, поскольку подъемная сила связана с квадратом относительной скорости - - передние лопасти создают большую подъемную силу, чем отходящие («асимметрия подъема»), вызывая создание опасного момента качения для транспортного средства.
- передние лопасти создают большую подъемную силу, чем отходящие («асимметрия подъема»), вызывая создание опасного момента качения для транспортного средства.
Решение, которое было найдено для уменьшения этого явления, состоит в том, чтобы оставить лопасти ротора свободными для выполнения вертикального движения за счет применения шарниров, называемых "хлопанье”, Что за счет изменения углов падения позволяет минимизировать разницу подъемной силы между двумя областями. Фактически, удаляющиеся лопасти будут стремиться двигаться вниз, следовательно, увеличивая свой угол атаки из-за составляющей относительной вертикальной скорости, направленной вверх, и, следовательно, создаваемой подъемной силы. С другой стороны, передние лопасти будут стремиться двигаться вверх, уменьшая угол атаки из-за нисходящей компоненты относительной вертикальной скорости и, следовательно, создаваемой подъемной силы.
Проблема с этой системой балансировки возникает из-за того, что чем выше скорость движения вертолета, тем ниже относительная скорость, воспринимаемая удаляющимися лопастями, следовательно, тем больше должен быть угол атаки, чтобы обеспечить необходимую подъемную силу. уравновесить асимметрию. Однако за пределами определенного угла атаки лопасти срываются, то есть жила жидкости отделяется от аэродинамического профиля, вызывая полную потерю подъемной силы и увеличение аэродинамического сопротивления. Такое явление, названное срыв удаляющегося лезвия, приводит к внезапному опрокидыванию вертолета (подъемная сила, создаваемая передними лопастями, создает момент по отношению к оси крена самолета) с последующей потерей управления. По этой причине у каждого вертолета есть определенный Никогда не превышайте скорость, т.е. скорость подачи, которую нельзя превышать.
 С другой стороны, в конфигурации с коаксиальными роторами срыв отступающих лопаток происходит в противоположных областях двух роторов, поскольку они вращаются в противоположном направлении. Следовательно, не возникает дисбаланса подъемной силы между двумя половинами и не возникает момента качения, который мог бы вызвать опрокидывание вертолета. Там Никогда не превышайте скорость в случае вертолетов с этой конфигурацией она, следовательно, больше, поскольку срыв удаляющейся лопасти не является таким жестким, как в стандартной конфигурации, однако он всегда ограничен скоростью, которая вызывает явления сжимаемости на концах лопастей.
С другой стороны, в конфигурации с коаксиальными роторами срыв отступающих лопаток происходит в противоположных областях двух роторов, поскольку они вращаются в противоположном направлении. Следовательно, не возникает дисбаланса подъемной силы между двумя половинами и не возникает момента качения, который мог бы вызвать опрокидывание вертолета. Там Никогда не превышайте скорость в случае вертолетов с этой конфигурацией она, следовательно, больше, поскольку срыв удаляющейся лопасти не является таким жестким, как в стандартной конфигурации, однако он всегда ограничен скоростью, которая вызывает явления сжимаемости на концах лопастей.
Говоря о «взмахах», необходимо, таким образом, подчеркнуть проблему, связанную с этим аспектом, присутствующую в коаксиальных роторах, вращающихся в противоположных направлениях. Лопасти отдельных роторов должны свободно хлопать, чтобы минимизировать асимметрию подъема. Следовательно, два ротора должны быть размещены на определенном расстоянии друг от друга, чтобы избежать катастрофического контакта между их лопастями. Это значит, что общая высота вертолета такой конфигурации будет намного больше, чем у вертолета классической конфигурации.
И наоборот, тот факт, что им не нужен хвостовой винт, позволяет им иметь гораздо больше компактный что делает коаксиальную архитектуру интересным выбором даже для взлетающих вертолетов. Кроме того, одна из основных причин гибели вертолета связана с повреждением хвостового винта или трансмиссии, которая его приводит в действие.
Таким образом, в военном отношении отсутствие рулевого винта делает выполнение задания более безопасным, а также снижает риск поражения жизненно важными частями машины. Фактически, можно усилить зону, в которой присутствуют трансмиссионные валы и другие механические компоненты роторов, без чрезмерной нагрузки на вес, учитывая большую концентрацию этих устройств по сравнению со случаем стандартной конфигурации и, следовательно, меньшую площадь, которую они требуют. большая защита.
Наконец, еще одним преимуществом коаксиальной конфигурации является меньше шума продукт по сравнению со стандартной конфигурацией. Важным источником шума в вертолете является взаимодействие между вихрями, создаваемыми лопастями несущего винта, с рулевым винтом и высокая скорость вращения последнего, что необходимо из-за его малых размеров. За счет исключения рулевого винта вертолет, таким образом, работает значительно тише, производя при этом больший шум в области двух основных винтов по сравнению с однороторной архитектурой.
 выводы
выводы
Большинство разработанных ударных вертолетов имеют классическую архитектуру с несущим винтом и рулевым винтом, несмотря на различные преимущества, которые демонстрирует конфигурация с двумя соосными несущими винтами, вращающимися в противоположных направлениях. Мотивация заключается в механическая сложность требуется коаксиальной архитектурой. Просто подумайте о необходимости реализовать две наклонные шайбы, по одной для каждого ротора, которые могут наклоняться по-разному и с идеальным синхронизмом, и механические муфты, способные обеспечить противоположные крутящие моменты для двух роторов. Все это приводит к созданию сложных механических систем, которые более подвержены сбоям и трудны в обслуживании.
Компонент, относящийся к Ноу-хау необходимы для проектирования систем такой сложности, которыми в настоящее время владеют несколько компаний в мире. Достаточно сказать, что единственные боевые ударные вертолеты, которые полностью используют эту технологию, производятся Камовым, а на «западном фронте» Сикорский разработал S-97 «Raider» (в настоящее время является финалистом с прототипом «Raider X» в конкурсе на Разведывательный самолет будущего в армии США).
Фото: МО РФ / интернет / Армия США / Lockheed Martin